How can we select a suitable multi-criteria optimisation method among the dozens existing ones?

AUTHOR: Adeline de Montlaur
Pilot3 aims at providing a software engine model for supporting crew decisions in the context of operations for civil aircraft, with a better understanding of the stakes of the current mission, from the perspective of the business objectives of the airline (read more)
To do so, Pilot3 considers and reviews state-of-the-art multi-criteria decision-making optimisation techniques, and needs to select the most suitable ones and to implement them.
The challenging problem of selecting multi-objective optimisation methods
A plethora of multi-objective optimisation methods have been proposed in the last half-century, which can be for example classified into 4 main families:

Selecting an appropriate multi-objective optimisation method is by itself a multi-objective optimisation problem:
- multiple aspects to consider in this selection process,
- many comparison criteria difficult to quantify,
- many comparison criteria based on expertise and decision maker preferences.
→ Some methods may thus suit some problems and some decision makers better than others.
A domain-driven approach
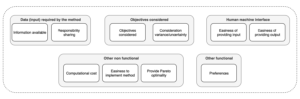
For this reason, in Pilot3 a domain-driven approach has been followed to perform this selection. Key domain-driven requirements to consider in this selection have been identified from different sources and grouped in 5 different categories:
A selection process based on filtering
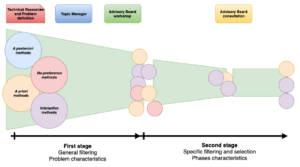
Pilot3 is comprised of different phases (generation, ranking and selection of trajectories), of different characteristics, which means that the selected optimisation method might be different for each phase. However, some of the characteristics of the problem apply to all phases. Therefore, the process to select the optimisation method(s) has followed a 2-stage approach:
- consider characteristics of the problem (tactical trajectory optimisation) using inputs from the proposal and problem definition, the Topic Manager and the first Advisory Board workshop. This allowed to filter the number of potential methods across all optimisation phases (generation, ranking and selection phases).
For example, for real-time calculations needed in Pilot3, the computational cost of a posteriori method is assumed to be prohibitive. Also ,though they are quite simple to implement, no-preference methods are also discarded, since the Pilot3 application seeks some implication of the decision maker. - consider specific characteristics of each phase using input from a follow-up consultation with the Advisory Board in order to finalise the benchmarking and selection of method process per phase.
For example, it was made clear that airlines would not be able to provide numerical targets for objectives, nor numerical bounds, nor relative weights of importance between objectives. Only ranking of importance would be an available input from the decision maker. This kind of insight was a key point in the final selection of the optimisation methods.
Taking into account the domain-driven requirements led to select
- one a priori method: the lexicographic ordering approach, for the generation of Pareto optimal trajectories, and
- a combination of 2 interactive methods: the compromise ranking method, also known as the VIKOR method, complemented by using a similar approach of the Analytical Hierarchy Process for assigning weights of relative importance of attributes, for the ranking and posterior selection of the alternative trajectories.